1.1.1
Pulse Width Modulation
(PWM)
PWM (Pulse Width Modulation) salah satu teknik modulasi
dengan mengubah lebar pulsa
(duty cylce) dengan nilai amplitudo
dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high
kemudian berada di zona transisi ke kondisi low.
Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar
pulsa High) dengan perioda.
Duty Cycle biasanya dinyatakan dalam bentuk
persen (%).
Gambar 1. Duty Cycle
·
Duty Cycle = tON / ttotal
·
tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (highatau 1)
·
tOFF = Waktu OFF atau Waktu
dimana tegangan keluaran
berada pada posisi
rendah(low atau 0)
·
ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut jugadengan “periode satu gelombang”.
Pada board Arduino Uno, pin yang bisa
dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin
tersebut merupakan pin yang
bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite(); PWM pada arduino
bekerja pada frekuensi
500Hz, artinya 500 siklus/ketukan
dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan
pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita
memberikan nilai 255, maka sepanjang siklus akan bernilai
5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah
dari 0 hingga 255, atau 50% dari 255), maka
setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0
volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka 1/4 siklus
akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan
terjadi 500 kali dalam 1 detik.

Gambar 2. Siklus
Sinyal PWM pada Arduino
1.1.2
Analog to Digital Converter (ADC)
ADC atau Analog to Digital
Converter merupakan salah satu perangkat
elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal
analog oleh sistem digital. Fungsi
utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal
digital dengan bentuk kode-kode digital. Ada
2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan
sampling dan resolusi.
Kecepatan sampling menyatakan seberapa
sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal
digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi
menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi
yang dimiliki adalah 10 bit atau rentang
nilai digital antara 0 - 1023. Dan pada Arduino
tegangan referensi yang digunakan
adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada
Arduino, menggunakan pin analog input yang diawali
dengan kode A( A0- A5 padaArduino Uno). Fungsi
untuk mengambil data sinyal input analog menggunakan analogRead(pin);.
1.1.3
Komunikasi
Pada Alat yang kami buat, kami menggunakan komunikasi UART untuk 2 arduino
yang kami gunakan.
Komunikasi UART adalah bagian perangkat
keras komputer yang menerjemahkan antara bit-bit
paralel data dan bit-bit
serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer
atau port serial perangkat
periperal.
Cara kerja komunikasi UART :
Gambar 3. Cara kerja komunikasi UART
Data
dikirimkan secara paralel
dari data bus ke UART1. Pada UART1 ditambahkan
start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan
data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data
bus penerima.
1.1.4
Mikrokontroller
Mikrokontroler adalah salah satu dari
bagian dasar dari suatu sistem komputer. Meskipun
mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler
dibangun dari elemen-elemen dasar yang sama.
Secara sederhana, komputer akan menghasilkan output yang spesifik
berdasarkan input yang diterima
dan program yang dikerjakan. Seperti
umumnya komputer, mikrokontroler sebagai alat yang mengerjakan perintah-perintah yang diberikan kepadanya. Artinya, bagian terpenting dan
utama dari suatu sistem komputerisasi adalah
program itu sendiri yang dibuat oleh seorang programmer. Program ini
memerintahkan komputer untuk melakukan jalinan
yang panjang dari aksi-aksi sederhana
untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer. Sistem
dengan mikrokontroler umumnya
menggunakan piranti input yang jauh lebih kecil seperti saklar atau keypad kecil. Hampir semua input mikrokontroler hanya dapat memproses sinyal input digital dengan
tegangan yang sama dengan tegangan logika dari
sumber. Tegangan positif sumber umumnya adalah 5 volt. Padahal dalam
dunia nyata terdapat banyak sinyal analog
atau sinyal dengan tegangan.
Gambar 4. Prinsip
kerja mikrokontroller
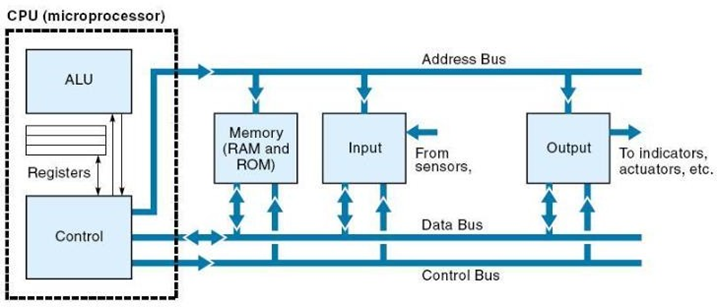
Gambar 5. Struktur dan diagram blok Mikrokontroler
Berikut ini merupakan struktur dan diagram blok
mikrokontroler beserta penjelasan tentang
bagian-bagian utamanya :
·
CPU
CPU merupakan otak dari mikrokontroler. CPU bertanggung jawab untuk mengambil instruksi (fetch),
menerjemahkannya (decode), kemudian akhirnya
dieksekusi (execute). CPU menghubungkan setiap bagian dari
mikrokontroler ke dalam satu sistem.
Fungsi utamanya yaitu mengambil dan mendekode instruksi. Instruksi yang diambil dari memori program harus diterjemahkan
atau melakukan decode oleh CPU
tersebut.
·
Serial Port (Port Serial)
Serial port menyediakan berbagai antarmuka serial antara
mikrokontroler dan periferal lain seperti
port paralel.
·
Memori (Penyimpanan)
Memori ini bertugas untuk menyimpan data. Data tersebut
merupakan data yang sudah diolah (output) atau data yang belum diolah (input). Penyimpanan ini berupa RAM dan
ROM. ROM digunakan untuk menyimpan data dalam jangka waktu yang lama. Sedangkan RAM digunakan untuk menyimpan data
sementara selama program
berjalan sampai akhirnya dipindahkan ke ROM.
·
Port Input/Output Paralel
Port input/output paralel
digunakan untuk mendorong
atau menghubungkan berbagai
perangkat seperti LED, LCD, printer,
memori dan perangkat
input/output lainnya ke mikrokontroler.
·
ADC (Analog to Digital
Converter)
Konverter ADC (Analog to Digital Converter) digunakan untuk
mengubah sinyal analog ke bentuk
digital. Sinyal input dalam konverter ini harus dalam bentuk analog (misalnya output
dari sensor) sedangkan outputnya dalam bentuk digital.
·
DAC (Digital to Analog Converter)
DAC (Digital to Analog Converter) melakukan operasi pembalikan konversi ADC (Analog
to Digital Converter). DAC mengubah sinyal digital menjadi
format analog. DAC ini biasanya
digunakan untuk mengendalikan perangkat analog seperti
motor DC dan lain sebagainya.
·
Interrupt Control (Kontrol Interupsi)
Interrupt Control (Kontrol Interupsi) bertugas untuk
mengendalikan penundaan terhadap pemrograman mikrokontroler. Bagian interrupt
control (kontrol interupsi) ini dapat dioperasikan secara internal ataupun eksternal.
·
Special Functioning Block (Blok
Fungsi Khusus)
Special functioning block merupakan bagian tambahan yang
dibuat mempunyai fungsi khusus.
Biasanya blok ini ditemukan pada arsitektur mikrokontroler di mesin robotika.
Tidak semua perangkat menggunakan
bagian ini.
·
Timer and Counter (Pengatur Waktu dan Penghitung)
Timer/counter ini digunakan
untuk mengukur waktu dan alat penghitungan. Keberadaan komponen ini sangatlah
penting. Karena informasi
waktu seringkali digunakan
pengaturan sistem supaya lebih akurat dan efektif.
1.1.5
Arduino Uno
Gambar
6. Arduino Uno
Arduino adalah kit elektronik atau papan
rangkaian elektronik open source yang di
dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang
kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi
serial agar Arduino dapat berhubungan dengan komputer
ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah
sebagai berikut :
|
Microcontroller
|
ATmega328P
|
|
Operating Voltage
|
5V
|
|
Input Voltage (recommended)
|
7-12V
|
|
Input Voltage (limit)
|
6-20V
|
|
Digital I/O Pins
|
14 (of
which 6 provide PWM output)
|
|
PWM Digital I/O
Pins
|
6
|
|
Analog Input Pins
|
6
|
|
DC Current per I/O Pin
|
20 mA
|
|
DC Current for 3.3V
Pin
|
50 mA
|
|
Flash Memory 32 KB
|
(ATmega328P)
|
|
SRAM
|
2 KB (ATmega328P)
|
|
EEPROM
|
1 KB (ATmega328P)
|
|
Clock Speed
|
16 MHz
|
|
LED_BUILTIN
|
13
|
|
Length
|
68.6 mm
|
|
Width
|
53.4 mm
|
Table 1. Spesifikasi Arduino uno
Bagian – bagian Arduino uno :
·
POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan
komputer lewat koneksi USB.
·
POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
·
Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung
pada Arduino. Jumlah
cetak menunjukkan 16000 atau 16000 kHz, atau 16
MHz.
·
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
·
Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk
memberikan nilai logika ( 0atau 1 ). Pin berlabel " ~ " adalah pin-pin
PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan
PWM.
·
Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan
untuk membaca sinyal atau sensor analog seperti
sensor jarak, suhu dsb, dan mengubahnya menjadi
nilai digital.
·
LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino
mendapatkan supply listrik dengan
baik.
Bagian – bagian pendukung Arduino Uno :
·
RAM
RAM (Random Access Memory) adalah tempat penyimpanan
sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan
letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces
Memory) dan DRAM (Dynamic Random
Acces Memory).
·
ROM
ROM (Read-only Memory) adalah perangkat keras pada computer
yang dapat menyimpan data secara
permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri
dariMask ROM, PROM, EPROM, EEPROM.
1.1.6
Resistor
Gambar 7.
Resistor
Resistor merupakan komponen penting
dan sering dijumpai
dalam sirkuit Elektronik. Boleh dikatakan hampir setiap
sirkuit Elektronik pasti ada Resistor. Tetapi
banyak diantara kita yang bekerja di perusahaan perakitan Elektronik
maupun yang menggunakan peralatan
Elektronik tersebut tidak mengetahui cara membaca kode warna ataupun kode angka yang ada ditubuh
Resistor itu sendiri.
Seperti yang dikatakan sebelumnya, nilai
Resistor yang berbentuk Axial adalah diwakili
oleh Warna-warna yang terdapat di tubuh (body) Resistor itu sendiri dalam bentuk Gelang. Umumnya terdapat 4 Gelang
di tubuh Resistor, tetapi ada juga yang 5 Gelang.
Gelang warna Emas dan Perak biasanya
terletak agak jauh dari gelang warna lainnya
sebagai tanda gelang terakhir. Gelang Terakhirnya ini juga merupakan nilai toleransi
pada nilai Resistor
yang bersangkutan.
Tabel dibawah ini adalah warna-warna yang terdapat di tubuh
Resistor:
Table 2.
Warna resistor
Tabel Kode Warna
Resistor Perhitungan untuk
Resistor dengan 4 Gelang warna
:
Gambar 8. Perhitungan Nilai resistor dengan
4 gelang warna
1.1.7
Sensor
Flame
Gambar 9. Flame Sensor
Flame sensor adalah sensor yang digunakan untuk mendeteksi adanya api
atau nyala api. Sensor ini sangat sensitif terhadap cahaya inframerah yang
dipancarkan oleh api dan dapat digunakan dalam berbagai aplikasi keselamatan,
seperti sistem deteksi kebakaran, alarm
kebakaran, dan sistem keselamatan pada peralatan industri.
Beberapa karakteristik yang terdapat pada flame sensor antara lain
adalah:
-
Tegangan Operasi: 3.3V hingga 5V DC
-
Konsumsi Arus: 15 mA
-
Spektrum Deteksi: 760 nm hingga 1100 nm (cahaya inframerah)
- Sudut
Pandang Deteksi: 60 derajat
- Waktu
Respon: ≤ 15 ms
- Jarak
Deteksi: hingga 100 cm (tergantung intensitas nyala api)
- Suhu
Operasi: -25°C hingga 85°C
Flame sensor berfungsi sebagai alat pendeteksi api dalam berbagai
aplikasi keamanan dan keselamatan. Sensor ini bekerja dengan mendeteksi radiasi
inframerah yang dipancarkan oleh api. Ketika sensor mendeteksi adanya api,
output digitalnya akan berubah dari nilai rendah (LOW) ke nilai tinggi (HIGH),
yang dapat digunakan untuk memicu alarm atau tindakan pengamanan lainnya.
Prinsip kerja flame sensor sangat sederhana. Sensor ini memiliki
fotodioda atau fototransistor yang sensitif terhadap cahaya inframerah. Ketika
ada sumber api, cahaya inframerah yang dipancarkan akan diterima oleh fotodioda
atau fototransistor tersebut, menghasilkan perubahan tegangan yang diubah
menjadi sinyal digital. Sinyal ini kemudian dapat dibaca oleh mikrokontroler
seperti Arduino untuk menentukan apakah ada api yang terdeteksi.
Flame
sensor sering digunakan dalam berbagai aplikasi, termasuk:
- Sistem
deteksi kebakaran
- Alarm
kebakaran otomatis
- Sistem
keamanan rumah
- Sistem
keselamatan industri
- Robot
pemadam kebakaran
- Sistem
proteksi pada peralatan elektronik yang rentan terhadap kebakaran
Dengan kemampuannya untuk mendeteksi api secara cepat dan akurat, flame
sensor menjadi komponen penting dalam berbagai sistem keselamatan dan keamanan
untuk mencegah dan mengurangi risiko kebakaran. Grafik respon.
Gambar 10.Grafik respon Flame Sensor
1.1.8
Sensor
pir
Gambar 11. Sensor PIR
Sensor PIR (Passive Infrared Sensor) adalah perangkat elektronik yang mendeteksi gerakan
dengan menangkap radiasi inframerah (IR) yang dipancarkan oleh benda hangat. Benda hangat, seperti manusia dan hewan, memancarkan radiasi IR dalam jumlah
kecil. Sensor PIR mendeteksi
perubahan radiasi IR ini dan menghasilkan sinyal listrik yang menunjukkan
adanya gerakan.
Cara Kerja Sensor PIR
1. Sensor Pyroelektrik: Sensor PIR terdiri dari dua elemen utama: lensa
Fresnel dan sensor pyroelektrik. Lensa Fresnel
memfokuskan radiasi IR ke sensor pyroelektrik. Sensor pyroelektrik terbuat
dari bahan kristal yang menghasilkan tegangan listrik ketika terkena perubahan
suhu.
2. Deteksi Gerakan: Ketika benda hangat bergerak di depan
sensor, radiasi IR-nya akan menyebabkan perubahan suhu pada sensor
pyroelektrik. Perubahan ini menghasilkan tegangan listrik, yang
memicu sinyal keluaran.
3. Zona Deteksi: Sensor PIR memiliki zona deteksi berbentuk kerucut
dengan jangkauan tipikal 5-10 meter. Sudut deteksi
horizontalnya berkisar antara 90-180 derajat, tergantung model
sensor.
Adapun spesifikasi dari sensor PIR, sebagai berikut :
Tegangan : 5V - 20V
Konsumsi Daya : 65mA
Output TTL : 3.3V, 0V
Waktu Tunda : Dapat Diatur (0.3 - 5 menit)
Waktu Kunci : 0.2 detik
Metode Pemicu:
• L - Nonaktifkan Pemicu Ulang
• H - Aktifkan Pemicu Ulang Jangkauan
Penginderaan: Kurang dari 120 derajat, dalam jarak 7meter Suhu:
-15°C - 70°C Dimensi: 32mm x 24mm, jarak antar sekrup 28mm, M2, diameter
lensa 23mm.
Grafik respon sensor PIR:
1.
Gambar 12. Respon terhadap arah, jarak, dan kecepatan.
2.
Gambar 13. Respon terhadap suhu.
1.1.9
Sensor
Vibration SW-420
Gambar 14. Sensor Vibration
Sensor getaran adalah perangkat yang
digunakan untuk mengukur getaran mekanis pada suatu objek atau sistem. Sensor
ini penting dalam berbagai aplikasi industri, manufaktur, dan pemeliharaan
karena getaran sering kali menunjukkan kondisi operasional mesin atau struktur.
Getaran yang tidak biasa dapat menunjukkan masalah seperti ketidakseimbangan,
keausan, atau kerusakan pada komponen mesin.
Cara kerja sensor vibration:
Sensor getaran bekerja dengan
mendeteksi dan mengukur gerakan osilasi atau getaran pada objek atau permukaan
tempat ia dipasang. Prinsip kerjanya biasanya didasarkan pada elemen
piezoelektrik, yang menghasilkan tegangan listrik saat mengalami tekanan
mekanis. Ketika objek atau permukaan bergetar, sensor merasakan perubahan
percepatan, kecepatan, atau perpindahan getaran tersebut dan mengubahnya
menjadi sinyal listrik. Sinyal ini kemudian diolah untuk memberikan informasi
tentang frekuensi, amplitudo, dan karakteristik getaran lainnya. Informasi ini
digunakan untuk menganalisis kondisi operasional mesin atau struktur dan
mendeteksi potensi masalah atau kerusakan.
Spesifikasi sensor vibration:
·
Operating Voltage: 3.3V to 5V DC
·
Operating Current: 15mA
·
Using SW-420 normally closed type vibration
sensor
·
LEDs indicating output and power
·
LM393 based design
·
Easy to use with Microcontrollers or even
with normal Digital/Analog IC
·
With bolt holes for easy installation
·
Small, cheap and easily available
Gambar
15. Grafik Response Vibration Sensor
1.1.10
Sensor Touch TTP223
Gambar 16. Touch Sensor
Touch sensor adalah perangkat yang mendeteksi sentuhan atau tekanan
fisik pada permukaannya dan mengubahnya menjadi sinyal listrik. Sensor ini
bekerja berdasarkan berbagai teknologi, termasuk resistif, kapasitif, atau
piezoelektrik. Pada sensor kapasitif, misalnya, sentuhan jari mengubah
kapasitansi di area yang disentuh, yang kemudian diinterpretasikan oleh sirkuit
sensor sebagai sinyal input. Touch sensor banyak digunakan dalam perangkat
elektronik seperti smartphone, tablet, layar sentuh, panel kontrol, dan
berbagai aplikasi interaktif lainnya. Sensor ini memungkinkan pengguna
berinteraksi dengan perangkat melalui sentuhan langsung, menawarkan antarmuka
yang intuitif dan responsif.
Cara kerja Touch Senso:
Touch sensor bekerja dengan mendeteksi sentuhan atau tekanan pada
permukaannya, menggunakan prinsip-prinsip seperti kapasitansi atau res
istansi.
Pada touch sensor kapasitif, prinsip kerjanya didasarkan pada perubahan
kapasitansi ketika objek konduktif, seperti jari manusia, mendekati atau
menyentuh permukaan sensor. Sensor ini memiliki lapisan konduktif yang
membentuk medan listrik; ketika jari menyentuh permukaan, kapasitansi berubah
dan sensor mendeteksi perubahannya, lalu mengubahnya menjadi sinyal listrik
yang diproses oleh sirkuit elektronik untuk menghasilkan respons, seperti
menghidupkan perangkat atau memicu fungsi tertentu. Pada touch sensor resistif,
dua lapisan konduktif terpisah oleh lapisan isolator tipis; ketika ditekan,
kedua lapisan bersentuhan, mengubah resistansi dan menghasilkan sinyal yang
diinterpretasikan sebagai sentuhan.
Spesifikasi Touch Sensor:
·
On-board TTP223 capacitive touch a
single bond induction IC;
·
Board level indicator;
·
Working voltage: 2.0 V to 5.5 V;
·
Size of the PCB board: 29mm x 16mm.
Pin configuration:
1. VCC: 2V to 5.5V DC
2. OUT: high/low output
3. GND: ground
Schematic Diagram
Gambar 17. Schematic
Diagram
Gambar 18. Grafik
Response Touch Sensor
1.1.11
Sensor Magnet
Gambar 19. Magnetic Sensor
Magnetic
sensor bekerja dengan mendeteksi perubahan medan magnet di sekitarnya dan
mengubahnya menjadi sinyal listrik yang dapat dianalisis. Prinsip kerja utama
dari sensor ini sering kali melibatkan efek Hall atau magnetoresistansi. Pada
sensor Hall, perubahan medan magnet mempengaruhi arus listrik yang mengalir
melalui bahan semikonduktor, menghasilkan tegangan Hall yang proporsional
dengan kekuatan medan magnet. Sensor magnetoresistif, di sisi lain, mengubah
resistansi listriknya sebagai respons terhadap medan magnet. Magnetic sensor
digunakan dalam berbagai aplikasi, termasuk kompas digital, deteksi posisi dan
kecepatan dalam motor listrik, sistem keamanan, dan perangkat navigasi. Sensor
ini mampu memberikan informasi yang akurat tentang orientasi, posisi, dan
pergerakan objek yang mengandung bahan magnetik.
Cara kerja Magnetic Sensor:
Prinsip
kerja sensor magnetik didasarkan pada pendeteksian perubahan medan magnet dan
mengubah perubahan ini menjadi sinyal listrik yang dapat diukur. Salah satu
mekanisme yang umum digunakan adalah efek Hall, di mana arus listrik yang
mengalir melalui bahan semikonduktor menghasilkan tegangan yang tegak lurus
terhadap arus dan medan magnet yang diterapkan. Ketika medan magnet mendekati
atau menjauh dari sensor, tegangan Hall berubah, memungkinkan pengukuran
kekuatan dan arah medan magnet. Selain itu, sensor magnetoresistif mengubah
resistansi listriknya sebagai respons terhadap medan magnet, yang juga dapat
diukur untuk mendeteksi perubahan medan magnet. Sensor magnetik banyak
digunakan dalam aplikasi seperti pengukuran posisi dan kecepatan pada motor
listrik, kompas digital, perangkat navigasi, dan sistem keamanan untuk
mendeteksi gerakan atau keberadaan objek magnetik.
Spesifikasi Mgnetic Sensor:
·
Cylindrical case: M12 x
80mm
·
Threaded plastic body
·
Form C 100V - 0.25A - 3VA
·
Front side switching
·
External dimensions M 12 X
1: L =80mm
·
Protection degree IP67
·
Operating temperature-25 to
+75°C
·
Output connection: PVC
Cable (2 mètres / 2 meters)
·
Wires = 3 x 0. 34 mm2 / 3 x
AWG22
Gambar 20. Grafik response Magnetic Sensor
1.1.12 Liquid Crystal Display (LCD)
Gambar 21. LCD
LCD atau Liquid Crystal Display adalah
suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid
crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display
(LCD) atau Penampil Kristal Cair sudah banyak digunakan
pada produk-produk seperti
layar Laptop, layar Ponsel, layar Kalkulator,
layar Jam Digital, layar Multimeter,
Monitor Komputer, Televisi, layar Game portabel, layar Thermometer
Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding
dengan teknologi Tabung Sinar Katoda (Cathode
Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga
jauh lebih hemat dalam mengkonsumsi
daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip
pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya
latar belakang) sebagai
cahaya pendukung karena LCD sendiri tidak memancarkan
cahaya. Beberapa jenis backlight yang umum digunakan
untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan
backlight LED (Light-emitting diodes).
LCD atau Liquid Crystal Display pada
dasarnya terdiri dari dua bagian utama yaitu bagian Backlight
(Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal
Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun,
LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight
atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut
pada umumnya adalah berwarna putih. Sedangkan Kristal
Cair (Liquid Crystal) sendiri
adalah cairan organik yang berada diantara dua lembar kaca yang memiliki
permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
·
Lapisan Terpolarisasi 1 (Polarizing Film 1)
·
Elektroda Positif (Positive Electrode)
·
Lapisan Kristal Cair (Liquid
Cristal Layer)
·
Elektroda Negatif (Negative Electrode)
·
Lapisan Terpolarisasi 2 (Polarizing film 2)
·
Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar
struktur dasar sebuah
LCD:
Gambar 22.Struktur
LCD
LCD yang digunakan pada Kalkulator dan
Jam Tangan digital pada umumnya menggunakan
Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan
LCD yang lebih modern dan berkekuatan tinggi
seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu
Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight
tersebut pada umumnya berbentuk persegi panjang atau
strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan
warna cahaya tersebut
akan terlihat apabila
cahaya putih mengalami refleksi atau perubahan arah
sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya
yang dihasilkan.
Backlight LCD yang berwarna putih akan
memberikan pencahayaan pada Kristal Cair atau Liquid Crystal.
Kristal cair tersebut
akan menyaring backlight
yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah
apabila diberikan tegangan
dengan nilai tertentu.
Karena dengan perubahan
sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi
berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar- lebarnya sehingga cahaya backlight yang
berwarna putih dapat ditampilkan sepenuhnya.
Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair
harus ditutup serapat-rapatnya
sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka
diperlukan pengaturan sudut refleksi kristal
cair yang bersangkutan.
1.1.13 Jumper
Jumper adalah suatu istilah kabel yang
ber-diameter kecil yang di dalam dunia elektronika
digunakan untuk menghubungkan dua titik atau lebih dan dapat juga untuk menghubungkan 2 komponen elektronika.
Jenis-jenis jumper:
·
Male-male
Gambar 23. Jumper
Male-male
Kabel jumper jenis ini digunakan untuk
koneksi male to male pada kedua ujung kabelnya.
·
Male-female
Gambar 24. Jumper
Male-female
Kabel jumper jenis ini digunakan untuk koneksi male to
female dengan salah satu ujung kabel dikoneksi male dan
satu ujungnya lagi dengan koneksi female.
·
Female-female
Gambar 25. Jumper
female-female
Kabel jumper jenis
ini digunakan untuk koneksi female
to female pada kedua ujung kabelnya.
1.1.14 baterai
Gambar 26. Baterai
Baterai
(Battery) adalah sebuah alat yang dapat merubah
energi kimia yang disimpannya menjadi
energi Listrik yang dapat digunakan
oleh suatu perangkat
Elektronik. Hampir semua perangkat elektronik yang portabel seperti
Handphone, Laptop, Senter,
ataupun Remote Control
menggunakan Baterai sebagai
sumber listriknya. Dalam
kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali
saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable).
·
Baterai Primer (Baterai Sekali Pakai/Single Use)
Baterai Primer atau Baterai sekali pakai ini merupakan
baterai yang paling sering ditemukan
di pasaran, hampir semua toko dan supermarket menjualnya. Hal ini dikarenakan penggunaannya yang luas dengan harga yang lebih terjangkau. Baterai jenis ini pada umumnya memberikan
tegangan 1,5 Volt dan terdiri dari berbagai jenis ukuran seperti
AAA (sangat kecil),
AA (kecil) dan C (medium)
dan D (besar). Disamping itu, terdapat juga Baterai Primer (sekali
pakai) yang berbentuk kotak dengan tegangan 6 Volt ataupun 9 Volt.
Gambar 27. Contoh
baterai primer
·
Baterai Sekunder (Baterai Isi Ulang/Rechargeable)
Baterai
Sekunder adalah jenis baterai yang dapat di isi ulang atau Rechargeable Battery. Pada prinsipnya, cara Baterai
Sekunder menghasilkan arus listrik adalah sama
dengan Baterai Primer. Hanya saja, Reaksi Kimia pada Baterai Sekunder ini dapat berbalik (Reversible). Pada saat
Baterai digunakan dengan menghubungkan beban
pada terminal Baterai (discharge), Elektron akan mengalir dari Negatif ke Positif. Sedangkan pada saat Sumber Energi
Luar (Charger) dihubungkan ke Baterai
Sekunder, elektron akan mengalir dari Positif ke Negatif sehingga terjadi pengisian
muatan pada baterai.
Jenis-jenis Baterai yang dapat di isi ulang (rechargeable
Battery) yang sering kita temukan antara lain seperti Baterai Ni-cd (Nickel-Cadmium), Ni-MH (Nickel-Metal Hydride)
dan Li-Ion (Lithium-Ion).
Gambar 28. Contoh
baterai sekunder
1.1.15
Bread Board
Gambar 29. Breadboard
Breadboard merupakan sebuah board atau papan yang berfungsi
untuk merancang sebuah
rangkaian elektronik sederhana. Breadboard tersebut nantinya akan dilakukan prototipe atau uji coba tanpa
harus melakukan solder. Umumnya breadboard terbuat
dari bahan plastik yang juga sudah terdapat berbagai lubang. Lubang tersebut sudah diatur sebelumnya sehingga membentuk
pola yang didasarkan pada pola jaringan di
dalamnya. Selain itu, breadboard yang bisa ditemukan di pasaran umumnya dibagi menjadi 3 ukuran. Pertama dinamakan
sebagai mini breadboard, kedua disebut medium
breadboard, dan yang terakhir dinamakan
sebagai large breadboard. Untuk mini breadboard, ia memiliki kurang
lebih 170 titik.
Sementara untuk medium breadboard sudah
dilengkapi dengan kurang lebih 400 titik.
Large breadboard memiliki lubang kurang lebih 830. Seperti gambar yang sudah ada di atas, bahwa mini breadboard
memiliki 200 titik hubung. Di bagian kanan sudah bisa dilihat pola layout yang digambarkan dengan garis biru. Di sini bisa dilihat
beberapa tulisan mulai dari A sampai dengan J.
Setelah itu masih ada angka 1,5, 10, 15,
maupun 20. Perpaduan antara huruf dan juga
angka tersebut merupakan sebuah koordinat. Misalnya, A1, B1, sampai dengan E1 saling terkoneksi berdasarkan pola koneksinya (Bisa dilihat pada gambar berwarna biru).
Sementara untuk A2 sampai dengan E2, A3 sampai dengan E3, F1 sampai dengan J1, dan seterusnya. Dengan memahami pola
tersebut, maka kita nanti bisa membuat sebuah
prototipe sehingga kita tidak bingung ketika harus menempatkan komponen- komponen
elektronik tersebut sesuai dengan tempatnya masing-masing.
1.1.16
Motor Servo
1
Gambar 30. Motor
Servo
Motor servo adalah sebuah perangkat atau aktuator putar
(motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo),
sehingga dapat di set-up atau di
atur untuk menentukan dan memastikan posisi sudut dari poros output motor.
motor servo merupakan perangkat yang
terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada
poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan
potensiometer dengan perubahan resistansinya saat
motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Prinsip kerja motor servo yaitu motor
servo dikendalikan dengan memberikan sinyal
modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan
akan menentukan posisi sudut putaran dari poros
motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut
90⁰. Bila pulsa lebih pendek dari 1,5 ms maka
akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum
jam), sedangkan bila pulsa yang
diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum
jam). Lebih jelasnya perhatikan
gambar dibawah ini.
Gambar 31. Pulse Width Modulation
Lebar pulsa kendali telah diberikan,
maka poros motor servo akan bergerak atau berputar
ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika
ada kekuatan eksternal yang mencoba memutar atau
mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang
dimilikinya (rating torsi servo). Namun motor
servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar
pulsa kendali harus diulang setiap
20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
1.1.17
Buzzer
Gambar 32. Buzzer
Buzzer adalah sebuah komponen
elektronika yang dapat menghasilkan getaran suara berupa gelombang bunyi. Buzzer akan menghasilkan getaran suara
ketika diberikan sejumlah tegangan
listrik dengan taraf tertentu sesuai dengan spesifikasi bentuk dan ukuran
buzzer itu sendiri. Pada umumnya,
buzzer ini sering digunakan sebagai alarm karena penggunaannya yang cukup mudah yaitu dengan memberikan
tegangan input maka buzzer akan menghasilkan getaran suara berupa gelombang bunyi yang dapat
didengar.
Spesifikasi :
· Nilai tegangan : 6V DC
· Tegangan pengoperasian : 4 hingga
8V DC
· Arus : ≤30mA
· Keluaran suara pada 10cm : ≥85dB
· Frekuensi resonansi : 2300 ±300Hz
· Nada : Berkelanjutan
· Suhu operasional : -25°C hingga
+80°C
· Suhu penyimpanan : -30°C hingga +85°C
· Berat : 2g
1.1.18
LED
Light Emitting Diode atau sering
disingkat dengan LED adalah komponen elektronika yang dapat memancarkan
cahaya monokromatik ketika diberikan tegangan maju. LED merupakan
keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang
dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang
dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak
oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote
Control perangkat elektronik lainnya. Bentuk fisik dari LED dapat dilihat pada
gambar berikut.
Gambar 33. LED
LED merupakan keluarga dari Dioda
yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda
yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED
hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari
Anoda menuju ke Katoda. LED atau Light Emitting Diode yang memancarkan cahaya
ketika dialiri tegangan maju ini juga dapat digolongkan sebagai Transduser yang
dapat mengubah Energi Listrik menjadi Energi Cahaya.
1.1.19
Keypad
Gambar 34. Keypad
Keypad 4x4 adalah sebuah perangkat input yang terdiri dari 16 tombol
yang disusun dalam bentuk matriks 4 baris dan 4 kolom. Setiap tombol terhubung
pada perpotongan antara satu baris dan satu kolom. Ketika sebuah tombol
ditekan, sirkuit pada titik perpotongan tersebut akan tertutup, mengirimkan
sinyal yang dapat dibaca oleh mikrokontroler atau prosesor untuk menentukan
tombol mana yang ditekan. Keypad 4x4 sering digunakan dalam proyek elektronik
seperti sistem keamanan, perangkat kendali akses, dan antarmuka pengguna
sederhana untuk memasukkan data atau perintah. Desainnya yang kompak dan
sederhana memudahkan integrasi dengan berbagai sistem digital.
Cara kerja komponen Keypad:
Prinsip kerja keypad 4x4 didasarkan pada teknik pemindaian matriks
(matrix scanning). Keypad ini memiliki 4 baris dan 4 kolom yang saling
terhubung pada titik perpotongan. Ketika sebuah tombol ditekan, baris dan kolom
yang berinterseksi pada tombol tersebut akan terhubung, menciptakan sirkuit
tertutup. Untuk mendeteksi tombol yang ditekan, mikrokontroler mengirimkan
sinyal logika rendah atau tinggi secara bergantian ke setiap baris, sementara
kolom dipantau untuk mendeteksi perubahan status sinyal. Jika suatu kolom
mendeteksi perubahan status saat baris tertentu diberi sinyal, mikrokontroler
dapat menentukan tombol yang ditekan dengan mengetahui koordinat baris dan
kolom tersebut. Proses pemindaian ini berlangsung sangat cepat sehingga dapat
mendeteksi penekanan tombol secara real-time.
Keypad Matriks 4×4;
Keypad ramping dengan 16 tombol ini menyediakan komponen antarmuka
manusia yang berguna untuk proyek mikrokontroler. Bagian belakang perekat yang nyaman
menyediakan cara sederhana untuk memasang keypad dalam berbagai aplikasi. Ini
didukung dengan baik untuk digunakan dengan mikrokontroler Propeller oleh blok
dan proyek BlocklyProp, serta perpustakaan dan tutorial C; lihat tautan di
bawah Sumber Daya Tambahan.
Fitur Utama:
Detail Papan Tombol Membran Matriks 4×4:
Peringkat Maksimum: 24 VDC, 30 mA
Antarmuka: Akses 8-pin ke matriks 4×4
Dimensi: Papan tombol: 2,7 x 3,0 inci (6,9 x
7,6 cm) Kabel: 0,78 x 3,5 inci (2,0 x 8,8 cm)
Kisaran suhu pengoperasian: 32 hingga 122 °F
(0 hingga 50 ° C)
Rangkaian pull up dan pull down
resistor
Pull Up dan Pull Down Resistor merupakan
suatu rangkaian elektronika yang digunakan untuk mengatur kondisi
tegangan output yang masuk ke pin I/O mikrokontroler.
Fungsi utama dari Rangkaian Pull UP dan
Pull DOWN Resistor ini adalah untuk menghindari
"Floating logic". Floating logic adalah suatu fenomena dalam
rangkaian mikrokontroler dimana
mikrokontroler tidak dapat membaca nilai tegangan yang masuk ke pin I/O. Hal tersebut dikarenakan
tegangan yang masuk tidak memenuhi nilai 5 Volt dan tidak juga 0 Volt. Oleh karena itu mikrokontroler sulit
untuk menentukan sinyal tersebut
termasuk katagori HIGH (5V) atau
LOW (0 V).
Pada dasarnya yang membedakan rangkaian
resistor Pull Up dan Pull Down hanya penempatan resistor dan push
button saja.
·
Kriteria Nilai Resistor Pull Up dan Pull Down
Umumnya resistor 10 k Ohm sudah cukup untuk mengatasi
rangkaian digital secara umum, namun
ntuk menentukan Nilai resistor pull-up atau pun Pull Down yang dipilih harus memperhatikan
2 point berikut :
a.
Level tegangan setelah ditambahkan “pull up” atau “pull down”.
Level tegangan harus dipertimbangkan karena chip digital
seperti mikrokontroller
biasanya memiliki batas level tegangan input yang dianggap sebagai sinyal low (biasanya batas sinyal
input low ditulis VIL, batas sinyal input
high ditulis VIH pada datasheet
mikrokontroller.
b.
Kecepatan rangkaian yang digunakan
Jika rangkaian yang di “pull up” atau “pull down” diperlukan untuk mengubah sinyal dari low ke high atau dari high ke low dengan cepat, misalnya untuk keperluan switching, komunikasi,
PWM, nilai resistor untuk “pull up”
dan “pull down” sangat menentukan apakah rangkaian tersebut bisa berfungsi dengan baik.
Maka dari pada 2 point kriteria diatas kita bisa mengacu pada datasheet microcontroller yang digunakan dan
kompleksitas rangkaian pendukung microcontoller. Dan untuk menentukan nilai resistor yang digunakan sobat kita
mencoba trial error dan bisa juga menggunakan rumus hukum Ohm :
Resistansi (Ohm)
= Volt (V) / Ampere (A)
Contoh : Volt input 5 volt dan Arus maksimum input arduino
50 mA sehingga : R = 5 V/
0.05 A
R = 100 Ohm
Sehingga nilai minimum resistor yang
digunakan bisa 100 Ohm tanpa toleransi, dan
jika ingin aman harus diatas 100 Ohm jika tidak ingin arduino rusak, contoh
umum resistor 330 ohm, 1 K Ohm, 10
k Ohm.
·
Rangkaian Pull Up Resistor
Resistor pull-up adalah resistor yang digunakan untuk
mencegah nilai float (nilai mengambang)
pada kondisi high dengan menambahkan sebuah resistor pada jalur sumber
tegangan dan paralel dengan
jalur input ke microcontroller.
Untuk Pull-up
resistor, salah satu kaki resistor
dihubungkan ke kutub Vcc (5v/3.3v pada Microcontroler), sedangkan
kaki resistor yang lain dicabangkan, satu
ke pin input MCU, dan yang lain ke switch on/off untuk disambungkan ke ground
(0V).
Gambar 35. rangkaian pull up
Pada gambar diatas kita bisa lihat, Vcc
tersambung ke pin, sehingga pin akan mendapatkan
signal HIGH, dan ketika push button ditekan, arus Vcc akan mengalir ke ground (0v), sehingga pin akan mendapat
signal LOW. Kondisi ini mirip (tidak sama) dengan kondisi
"normaly close".
·
Rangkaian Pull Down Resistor
Resistor Pull Down merupakan resistor yang digunakan untuk
mencegah nilai floating pada kondisi low dengan menambahkan resistor pada jalur ground.
Pada rangkaian Pull-down resistor, salah satu kaki resistor
dihubungkan ke kutub ground (0v),
sedangkan kaki resistor yang lain dicabangkan, satu ke pin input MCU, dan yang lain ke switch on/off untuk disambungkan
ke Vcc (5v/3.3v).
Gambar 36. rangkaian pull down
Pada rangkaian pull-down, Vcc tidak
terhubung dengan pin, tetapi pin terhubung dengan
ground (0v), pin dalam keadaan LOW, dan ketika push button ditekan, Vcc akan terhubung dengan pin, kondisi pin
sekarang menjadi HIGH. Rangkaian ini mirip dengan kondisi "normally
open".